カーネル法(Kernel methods)の応用例の一つにガウス過程回帰(Gaussian Process Regression)があるので、当記事ではガウス過程回帰の導出の流れとPythonプログラムを用いたガウス過程の作成に関して取り扱います。
作成にあたっては「ガウス過程と機械学習」の$3$章の「ガウス過程」と「パターン認識と機械学習」の$6.4$節の「Gaussian Processes」を参考にしました。
・参考
カーネル関数の計算とPythonを用いたグラフの作成
https://www.hello-statisticians.com/explain-terms-cat/kernel_methods1.html
ガウス過程
https://www.hello-statisticians.com/explain-terms-cat/kernel_methods2.html
Contents
ガウス過程回帰の仕組み
同時分布の導出
実際に観測されるサンプルを$(\mathbf{x}_1,t_1), …, (\mathbf{x}_N,t_N)$とおくとき、実測値$t_n$と予測値$t_n$に関して下記が成立すると考える。
$$
\large
\begin{align}
t_n = y_n + \epsilon_n \\
\epsilon_n \sim \mathcal{N}(0,\sigma^2)
\end{align}
$$
このとき条件付き確率$p(t_n|y_n)$は上記に基づいて下記のように表すことができる。
$$
\large
\begin{align}
p(t_n|y_n) = \mathcal{N}(y_n,\sigma^2)
\end{align}
$$
上記を$N$個のサンプルに関して考えると下記が成立する。
$$
\large
\begin{align}
p(\mathbf{t}|\mathbf{y}) &= \mathcal{N}(\mathbf{y},\sigma^2 I_N) \\
\mathbf{t} &= \left( \begin{array}{c} t_{1} \\ \vdots \\ t_{N} \end{array} \right) \\
\mathbf{y} &= \left( \begin{array}{c} y_{1} \\ \vdots \\ y_{N} \end{array} \right)
\end{align}
$$
また、前項の$\mathbf{y} \sim \mathcal{N}(\mathbf{0},\lambda^2 \boldsymbol{\Phi} \boldsymbol{\Phi}^{\mathrm{T}})$より、$p(\mathbf{y})$は下記のように表せる。
$$
\large
\begin{align}
p(\mathbf{y}) = \mathcal{N}(\mathbf{0},\lambda^2 \boldsymbol{\Phi} \boldsymbol{\Phi}^{\mathrm{T}})
\end{align}
$$
このとき、周辺分布$p(\mathbf{t})$は下記のように考えることができる。
$$
\large
\begin{align}
p(\mathbf{t}) = \int p(\mathbf{t}|\mathbf{y}) p(\mathbf{y}) d \mathbf{y}
\end{align}
$$
上記に対して「多次元正規分布におけるベイズの定理を用いた周辺確率の導出」で取り扱った結果を元に考えると、$p(\mathbf{t})$は下記のように表せる。
$$
\large
\begin{align}
p(\mathbf{t}) &= \int p(\mathbf{t}|\mathbf{y}) p(\mathbf{y}) d \mathbf{y} \\
&= \mathcal{N}(\mathbf{0},C) \quad (6.61) \\
C &= \sigma^2 I_N + \lambda^2 \boldsymbol{\Phi} \boldsymbol{\Phi}^{\mathrm{T}} = \sigma^2 I_N + K \quad (6.62)’
\end{align}
$$
上記の$K$はグラム行列に一致し、「カーネル関数」に基づいて計算できる。上記は$\mathbf{t}$に関する同時分布であるが、ここで新たなサンプルの$\mathbf{x}_{N+1}$が得られたとき、下記で定める$\mathbf{t}_{N+1}$に関する同時分布を新たに考える。
$$
\large
\begin{align}
\mathbf{t}_{N+1} &= \left( \begin{array}{c} t_{1} \\ t_{2} \\ \vdots \\ t_{N} \\ t_{N+1} \end{array} \right)
\end{align}
$$
ここで同時分布$p(\mathbf{t}_{N+1})$は$(6.61)$に基づいて下記のように得られると考える。
$$
\large
\begin{align}
p(\mathbf{t}_{N+1}) &= \mathcal{N}(\mathbf{0},C_{N+1}) \quad (6.64)
\end{align}
$$
ここで$C_{N+1}$の$(i,j)$成分を$(C_{N+1})_{ij}$とおくと、$(C_{N+1})_{ij}$は「カーネル関数」$k(\mathbf{x},\mathbf{x}’)$を用いて$(C_{N+1})_{ij} = \sigma^2 (I_{N})_{ij} + k(\mathbf{x}_{i},\mathbf{x}_{j})$のように計算できる。
同時分布の条件付き分布の計算による予測分布の導出
前項で計算を行なった$p(\mathbf{t}_{N+1}) = \mathcal{N}(\mathbf{0},C_{N+1})$に対して、条件付き分布$p(t_{N+1}|\mathbf{t})$を導出することを当項では考える。前項の同時分布$p(\mathbf{t}_{N+1})$に関して下記のような式表記を定める。
$$
\large
\begin{align}
p(\mathbf{t}_{N+1}) &= \mathcal{N}(\mathbf{0},C_{N+1}) \quad (6.64) \\
C_{N+1} &= \left( \begin{array}{cc} C_{N} & \mathbf{k} \\ \mathbf{k}^{\mathrm{T}} & c \end{array} \right) \quad (6.65) \\
(C_{N+1})_{ij} &= \sigma^2 (I_{N+1})_{ij} + k(\mathbf{x}_{i},\mathbf{x}_{j}) \quad (6.62)^{”}
\end{align}
$$
上記に対し、多次元正規分布の条件付き確率に関する$(2.81),(2.82)$式を用いることで、$p(t_{N+1}|\mathbf{t})$が下記のように導出できる。
$$
\large
\begin{align}
p(t_{N+1}|\mathbf{t}) = \mathcal{N}(\mathbf{k}^{\mathrm{T}}C_{N}^{-1}\mathbf{t}, c-\mathbf{k}^{\mathrm{T}}C_{N}^{-1}\mathbf{k}) \quad (6.66), (6.67)
\end{align}
$$
なお、多次元正規分布の条件付き確率に関する$(2.81),(2.82)$式の導出は下記で詳しく取り扱った。
また、式の適用の詳細に関しては「パターン認識と機械学習」の演習$6.20$の解答で取りまとめた。
予測値が複数の場合の予測分布の作成
$M$個の予測値を表すにあたって、下記のように$\mathbf{t}_{M},\mathbf{t}_{N+M}$を定める。
$$
\large
\begin{align}
\mathbf{t}_{M} &= \left( \begin{array}{c} t_{1} \\ \vdots \\ t_{M} \end{array} \right) \\
\mathbf{t}_{N+M} &= \left( \begin{array}{c} t_{1} \\ \vdots \\ t_{N} \\ t_{N+1} \\ \vdots \\ t_{N+M} \end{array} \right)
\end{align}
$$
上記に対して、同時分布$p(\mathbf{t}_{N+M})$を下記のように表すことを考える。
$$
\large
\begin{align}
p(\mathbf{t}_{N+M}) &= \mathcal{N}(\mathbf{0},C_{N+M}) \\
C_{N+M} &= \left( \begin{array}{cc} C_{N} & \mathbf{k}_2 \\ \mathbf{k}_2^{\mathrm{T}} & C_{M} \end{array} \right) \\
(C_{N+M})_{ij} &= \sigma^2 (I_{N+M})_{ij} + k(\mathbf{x}_{i},\mathbf{x}_{j})
\end{align}
$$
上記の同時分布$\mathbf{t}_{N+M}$に、多次元正規分布の条件付き確率に関する$(2.81),(2.82)$式を用いることで、$p(\mathbf{t}_{M}|\mathbf{t})$が下記のように導出できる。
$$
\large
\begin{align}
p(\mathbf{t}_{M}|\mathbf{t}) = \mathcal{N}(\mathbf{k}_2^{\mathrm{T}}C_{N}^{-1}\mathbf{t}, C_{M}-\mathbf{k}_2^{\mathrm{T}}C_{N}^{-1}\mathbf{k}_2) \quad (6.66)’, (6.67)’
\end{align}
$$
予測値が複数の場合の予測に関しては「ガウス過程と機械学習」の「公式$3.8$」で取り扱われているので、詳しく確認する際は合わせて参照すると良いと思われる。
Pythonプログラムを用いたガウス過程回帰の実行
「予測値が複数の場合の予測分布の作成」の内容を元に、以下ガウス過程回帰の計算と図式化を行う。
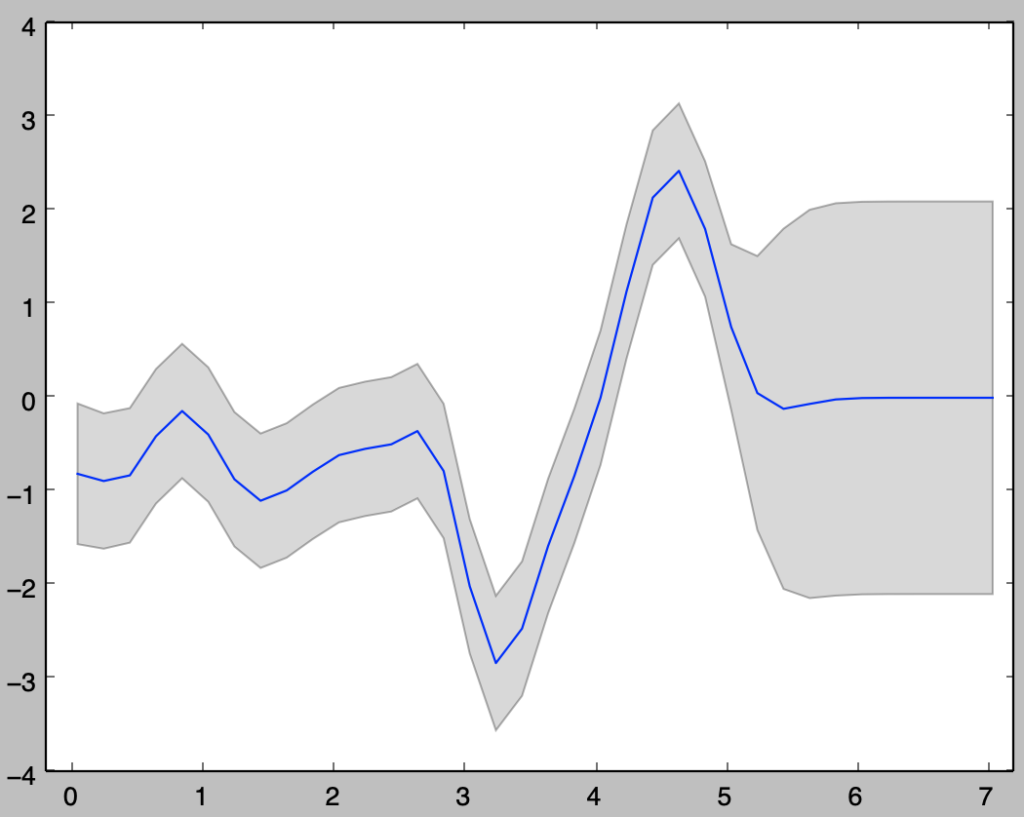
予測分布
下記を実行することで$2 \sigma$区間の予測分布の作成を行える。
import numpy as np
import matplotlib.pyplot as plt
from scipy import stats
np.random.seed(0)
theta = np.array([1., 10., 0., 0.])
x = np.arange(0.,5.1,0.1)
n = x.shape[0]
sigma2 = 0.02
x_ = np.arange(0.05,7.25,0.2)
n_ = x_.shape[0]
x_all = np.zeros(n+n_)
x_all[:n] = x
x_all[n:] = x_
K = np.zeros([n+n_,n+n_])
for i in range(n+n_):
for j in range(n+n_):
K[i,j] = theta[0]*np.exp(-theta[1]*(x_all[i]-x_all[j])**2/2) + theta[2] + theta[3]*x_all[i]*x_all[j]
if i==j:
K[i,j] += sigma2*beta
Lamb, U_T = np.linalg.eig(K[:n,:n])
Lamb, U_T = Lamb.real, U_T.real
U = U_T.T
A = np.dot(U_T,np.diag(np.sqrt(Lamb)))
y = np.dot(A,stats.norm.rvs(loc=0,scale=1,size=n))
mu = np.dot(K[n:,:n],np.dot(np.linalg.inv(K[:n,:n]),y))
Sigma = K[n:,n:] - np.dot(K[n:,:n],np.dot(np.linalg.inv(K[:n,:n]),K[:n,n:]))
sigma = np.sqrt(np.diagonal(Sigma))
ly = mu - 2.*sigma
uy = mu + 2.*sigma
plt.plot(x_all[n:],np.dot(K[n:,:n],np.dot(np.linalg.inv(K[:n,:n]),y)))
plt.fill_between(x_all[n:],ly,uy,facecolor="gray",alpha=0.3)
plt.xlim(-0.2,7.2)
plt.show()・実行結果